Sikloid merupakan salah satu jenis kurva yang sangat terkenal (lihat saja ia mempunyai nama khusus), selain itu yang membuat kurva ini meraih popularitas adalah beberapa nama matematikawan besar dunia telah berkerja dalam pencarian solusi berkenaan dengan permasalahan yang berhubungan dengan sikloid. Sikloid bisa dipahami secara fisik sebagai kurva jejak dari sebuah titik pada tepian roda, ketika
roda tersebut menggelinding (melakukan gerak translasi dan rotasi dalam
waktu yang bersamaan) pada suatu lintasan lurus.
 |
| Cukup sulit dibayangkan, ilustrasi ini akan sangat membantu. |
Dalam kuliah kalkulkus telah kita ketahui bahwa kurva sikloid yang dibangun oleh lingkaran berjari-jari r, memiliki persamaan parametrik sebagai berikut:


dengan t merupakan parameter real.
Kebanyakan para matematikawan dulu bersusah payah mencari luas daerah dibawah kurva ini dengan berbagai pendekatan sebut saja Galileo (1564-1642), Roberval (1602-1675), Cavalieri (1598-1647), Fermat (1601-1665) dan Descartes (1596-1650). Hingga akhirnya Blaise Pascal (1623-1662) menutup masalah pencarian luas ini dalam sebuah paper berjudul "L'Histoire de la Roulette". Masih banyak pertanyaan seputar kurva ini yang bisa dimunculkan, salah satunya adalah panjang kurva itu sendiri. Perhitungan panjang dari jejak roda (sikloid) ini mungkin dilakukan dengan memanfaatkan rumus integral untuk panjang kurva yaitu,
Perhitungan panjang kurva ini banyak dijumpai dalam buku teks kalkulus, sehingga saya tidak akan menulis ulang di blog ini. Namun, saya akan membahas tentang suatu masalah yang tidak terpecahkan dalam suatu sesi kuliah yang saya ikuti beberapa minggu lalu, yaitu bagaimana jika sebuah batang yang lebih panjang dari jari-jari roda, ditempatkan sebagai jari-jari roda, berapa panjang kurva yang terbentuk?
 |
| Batang 'biru' membuat jejak 'merah' yang membentuk sikloid ketika roda menggelinding |
Untuk menjawab pertanyaan diatas, adalah perlu menentukan persamaan parametrik untuk kurva ini, agar kita dapat menerapkan rumus integral untuk panjang kurva (L).
 |
| Kondisi awal |
Disini batang dan jari-jari memiliki panjang yang fix, masing-masing r dan m, sedangkan sudut a merupakan variabel bergantung, begitu pula dengan r tan(a). Sebelum lebih jauh, kita akan menghitung laju perubahan elevasi sudut a (hanya pada separuh pergerakan roda), mengingat bentuk kurva yang simetris. Terlihat bahwa roda akan menempuh sudut sebesar  , sehingga proyeksi ujung batang pada sumbu x telah menempuh r tan(a) juga separuh dari perpindahan pusat roda
, sehingga proyeksi ujung batang pada sumbu x telah menempuh r tan(a) juga separuh dari perpindahan pusat roda  "\inline r(\pi -a)") . Akibatnya besar sudut yang telah ditempuh tiap unit pada sumbu x dapat dinyatakan sebagai,
. Akibatnya besar sudut yang telah ditempuh tiap unit pada sumbu x dapat dinyatakan sebagai,
Sehingga interval dari parameter t yang dipilih adalah +r(\pi -a)] "\inline [0, rtan(a)+r(\pi -a)]") .
.
 |
| Fungsi x(t) dan y(t) merupakan fungsi posisi |
Mula-mula kita definisikan laju perubahan sudut a dalam fungsi t:
sehingga,
Untuk fungsi y(t) perhatikan sketsa berikut:
 |
| Posisi roda pada waktu tertentu |
sehingga didapat fungsi y(t),
karena r tan(a) bergantung pada m dan r, dengan memanfaatkan Phytagoras ianya dapat dinyatakan sebagai,
Sehingga semua kekacauan diatas dapat kita tata sebagai berikut:
Namun untuk menentukan panjang kurva, kita memerlukan fungsi turunan dari fungsi parametrik ini, untuk fungsi x(t) sepertinya tidak ada masalah, namun untuk y(t) sepertinya kita perlu sedikit menerapkan aturan rantai untuk mendapatkan fungsi turunannya.
Perhitungan Panjang Kurva
Saya tidak akan menghitung integral ini secara manual, disini komputer akan sangat membantu. Adalah lebih baik jika saya langsung menerapkan hasil ini pada contoh spesifik, dan meskipun demikian kita akan mendapati bahwa integral ini masih sulit dihitung, sehingga saya hanya akan menyajikan nilai pendekatannya saja.
Contoh Spesifik
 |
| Masalah khusus |
Jika roda yang dimaksud dikondisikan seperti ini, maka kita dapati bahwa,
Sebelum perhitungan lanjutan dilakukan, ada baiknya saya mengecek apakah kurva kita ini telah dengan benar merepresentasikan keadaan sebenarnya. Untuk itu saya perlu sesuatu yang lebih dari kalkulator grafik. Setelah input dengan benar diketik, berikut outputnya.
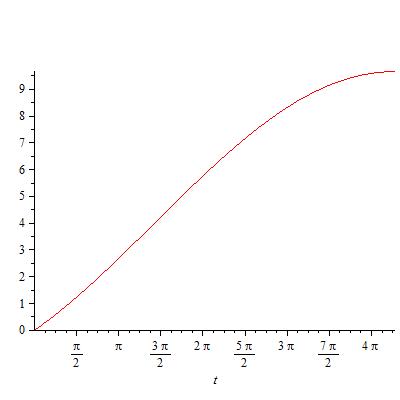 |
| Separuh bagian sikloid diplot dengan Maple 15 |
Jadi,
Jelas ini bukan suatu integral yang dapat dengan mudah dihitung secara manual, sehingga dengan bantuan komputer (dalam hal ini Wolfram Alpha), didapat:

Maka disimpulkan bahwa, untuk roda dengan jari-jari 4cm dengan batang sepanjang
Hasil ini meskipun tidak eksak namun sudah cukup memuaskan, karena 33,7361 cm tidak melebihi 42.176 cm yang merupakan panjang busur separuh lingkaran dengan jari-jari
Correct me if i am wrong!
")
